|
Основная задача, над решением которой они трудятся сегодня - это как научить беспилотные автомобили справляться с нештатными ситуациями. По дорогам с качественным покрытием, в регионах, где исключены сложные погодные условия, самоуправляемые автомобили могут передвигаться практически без дополнительного контроля. Но если маршрут может быть предсказуемым до мелочей, то условия езды нет. Беспилотник обязан безошибочно определять на дороге пешеходов и велосипедистов, учитывать наличие окружающего транспорта, отличать от выбоины от луж и пятен, обруливать преграды, а также двигаться в дождь, снег и туман. Все это возможно только в том случае, если реализовать в автомобиле систему, которая будет в режиме реального времени собирать данные об окружающей обстановке и на основе этих данных принимать соответствующие решения. Такие технологии уже существуют. LiDARСистема определения дальности с помощью света (сокращенно LiDAR) была разработана Velodyne LiDAR, базирующейся в Кремниевой долине. Ее суть состоит в том, чтобы оборудовать автомобиль вращающимися лазерами, которые излучают короткие импульсы инфракрасного света, а затем измеряют время возврата и на основе полученных данных составляют подробную 3D-карту окружающей среды. 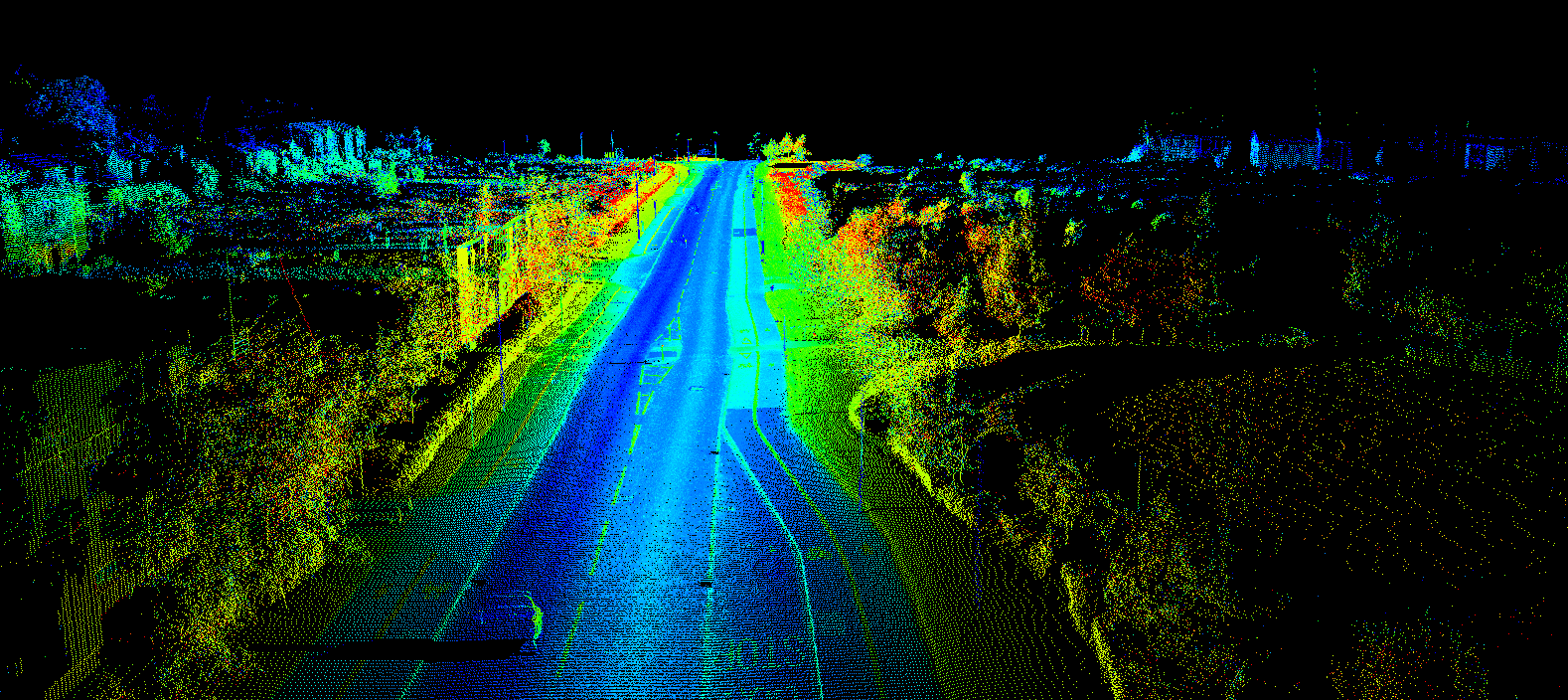 Наработками Velodyne LiDAR пользуется компания Google. Перед тем, как автомобили Google отправятся в самостоятельное путешествие, инженеры проедут по маршруту несколько раз, чтобы собрать нужный объем данных. Такой подход эффективен, но занимает много времени. Чтобы увеличить его практичность, необходимо полное 3D-отображение всей мировой инфраструктуры. Это колоссальная работа, и это именно то, чем занимаются сотрудники Google сегодня. Трехмерная карта - важный инфраструктурный элемент, без которого существование беспилотного транспорта немыслимо. Некоторые крупные автоконцерны в лице Ford и Audi интегрировали LiDAR в свои экспериментальные версии беспилотных авто. Однако не все считают LiDAR перспективной технологией. Глава Tesla, Илон Маск, придерживается другого подхода. Распознавание образовБезопасное передвижение в постоянно изменяющихся условиях можно обеспечить при помощи распознавания образов, попадающих в поле зрения камеры. Это единственный способ уловить такие переменные указатели, как светофоры, сигналы поворотников, дорожные знаки и все, что нельзя внести в общую базу данных. 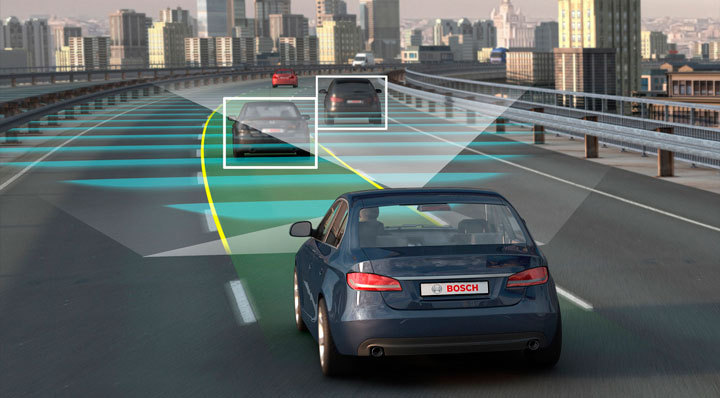 Распознавание образов можно разделить на две категории - машинное зрение и компьютерное зрение. Машинное зрение реализуется несколько проще, оно позволяет выделять объекты на основе ребер и углов, обнаруживать движение, его направление и оценивать расстояние. Все, что ему требуется – это несколько камер с высоким разрешением, установленные в автомобиле. Компьютерное зрение представляет собой более сложную структуру. Это задача – не просто распознавать объекты в камере, но и понимать, что этот объект делает, а также предсказывать его будущие действия. Пока что программы распознавания образов не имеют достаточного уровня точности, пригодного для транспортного беспилотника. LiDAR против компьютерного зренияКлючевым преимуществом LiDAR является то, что работа этой технологии не зависит от окружающего освещения, поэтому она эффективна практически в любых условиях. 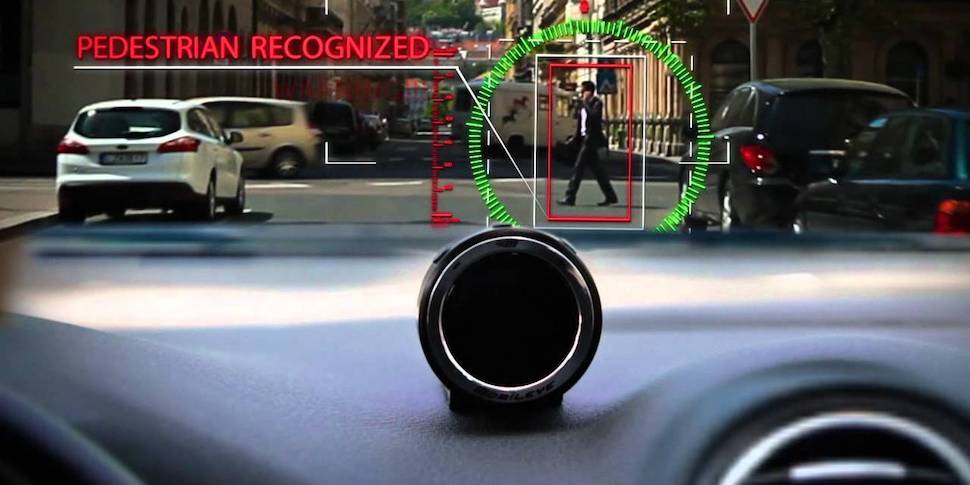 С другой стороны, LiDAR системы очень дороги. Например, 64-лазерный LiDAR стоит около 70 000 долларов – это стоимость нового автомобиля бизнес-класса. В то же время оборудование машины высококачественными камерами для распознавания образов обходится в десятки раз дешевле. Кажется, что все технологии, необходимые для создания безопасного беспилотного автомобиля уже существуют. По большей части это так. Можно сказать, что идеальным вариантом беспилотной системы было бы сочетание LiDAR и компьютерного зрения. Несмотря на скептицизм Маска, первая технология отлично подходит для общего изучения окружающей среды, а компьютерное зрение в свою очередь дополняет картину детальными подробностями. |
Популярные публикацииСамые популярные публикации по теме
|